Zeus 3000-XBaubericht von Fredi Wiegisser, Ottoberg
Mai 2014
| PDF zum Download
(rechte Maustaste, dann
"Ziel speichern unter") |
Kommentare und Anmerkungen erwünscht  |
| |
| Kommentare |
| |
Projektgrund
Für den lokalen Hangflug will ich ein leistungsstarkes und kunstflugtaugliches
Modell in der 2.5-3m Klasse als Ergänzung zu meiner bescheidenen Modellpalette aufnehmen. So suchte ich nach einem F3x Modell
in Voll-GFK Schalenbauweise, aber in einer etwas im Verhältnis zu dieser Wettbewerbsklasse schwereren Ausführung und mit
einem etwas voluminöseren Rumpf. Kaum einem Vereinskollegen erzählt, hat sich auch sofort eine Lösung ergeben: Ein roter
Zeus 3000-X von Launch Model, den ich als unberührten Bausatz von ihm übernommen und motorisiert habe. Dieser Allrounder
macht einen robusten Eindruck, und die Verarbeitung ist in Anbetracht des bescheidenen Preises für diese Seglerkategorie
sehr gut ausgeführt. Der Chinaflieger weist ein sauber gefertigtes Laminat auf, welches an den relevanten Stellen mit
Kohleeinlagen verstärkt ist. Die Rumpfnaht ist recht ansprechend, und die Passungen sind perfekt. Die Fläche ist mit
Querruder, Gigaflap und Wölbklappe ausgestattet, und das Heck weist ein Pendelleitwerk mit Seitenruder auf. Zum Einsatz
kommt wieder das S-Bus / S-Bus2 Konzept von Futaba, da es sich schon beim Thermik 3XL sehr bewährt hat. Für die
Telemetrie ist der GPS Logger von SM Modellbau vorgesehen, mit dem auch OLC Daten verarbeitet werden können. Dem
Projektziel 2014 steht also nichts mehr im Weg – Los geht’s!
|
 |
Zeus 3000-X von Launch Model in motorisierter Ausführung. 4-Klappen-Fläche in GFK mit Spannweite 2.96m
|
Ausbaukonzept
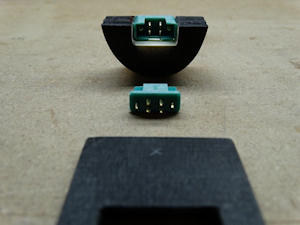
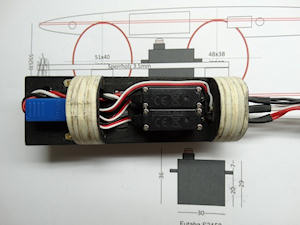
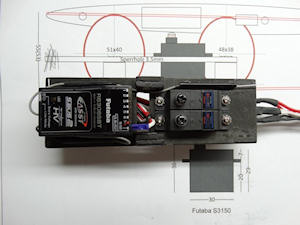
Ein Servobrett im Bereich des Schwerpunktes nimmt die beiden S-Bus Servos
für Höhe und Seite auf, sowie den smarten 2.4GHz FASSTest Empfänger. Die Einheit hat unterhalb der Kohlesteckung gerade
noch knapp Platz, und es ist Millimeterarbeit gefordert. Die Konstruktion ist notwendig, da vorne im Rumpf der gesamte
Platz für den Antriebsstrang benötigt wird. Die Servoverkabelung in die Flächen erfolgt dank dem S-Bus mit nur 3 Adern.
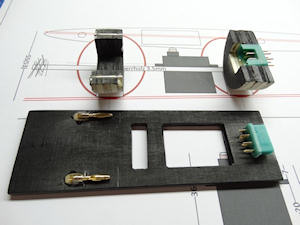
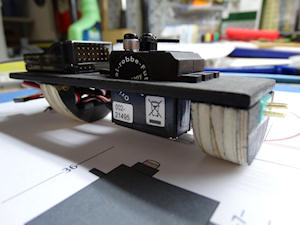
Das Servobrett ist für Servicezwecke auf die Spanten gesteckt, und zusätzlich zur Absicherung noch mit dem Rumpf
verschraubt. Die hintere Steckung ist zudem gleich noch die S-Bus Versorgung in die Flächen hinaus. Der vordere Spant
ist mit einer grossen Aussparung versehen, damit die gesamte Servo- und Empfängereinheit für Servicezwecke ein- und
ausgefahren werden kann. Die vier S-Bus Servos in den Flächen werden konventionell mittels Servorahmen montiert und
haben eine Z-Anlenkung mit obenliegenden Hörnern an den Klappen. Der S-Bus unterstützt bis zu 18 RC-Kanäle, wovon
ich 7 (+1 für Butterfly) benötige.
Für die Telemetrie wird ein S-Bus2 Kabel nach vorne verlegt, wo der austauschbare GPS Logger eingesteckt wird. Der GPS
Logger wird für Livedaten sowie für die Verarbeitung von gespeicherten OLC Daten verwendet.
Als Antrieb dient ein Poly-Tec Getriebemotor 480-32XL mit Maxon Getriebe 4.4:1. Der Motor besticht durch seine relativ
kleine Bauform und sein geringes Gewicht, verliert aber deswegen gegenüber dem ebenfalls evaluierten Hacker B50-10L mit
Getriebe 6.7:1 nicht an Leistung. Als Regler kommt ein 115A ePower zum Einsatz, welches ein SBEC aufweist für
einstellbare 5-6V und 5A Konstantstrom. Der Antriebsakku ist ein Zippy Compact LiPo 4S mit 2‘450mAh und 35C
Entladekapazität. Als Klappluftschraube dient eine RFM 14x8 in Kombination mit einem 34mm Simprop Turbo Spinner mit
38/8mm Mittelstück. Diese Konfiguration ergibt ca. 850W Eingangsleistung bei rund 60A Strom, und die Erwartungen
zielen auf schnelles, senkrechtes Steigen ab.
|
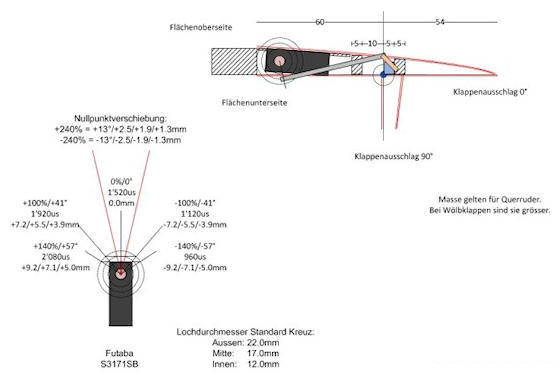 |
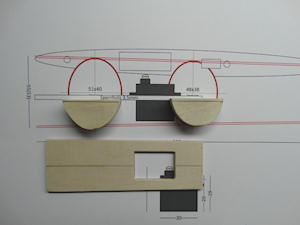
| Die Z-Anlenkung benötigt vorab einige überlegungen bezüglich den gewünschten
Ruderausschlägen und den baulichen und elektromechanischen Begrenzungen. |
 |
Planung des steckbaren Empfänger- und Servobretts.
|
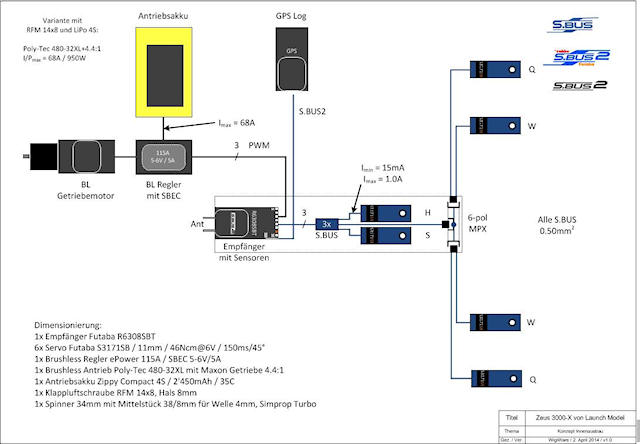 |
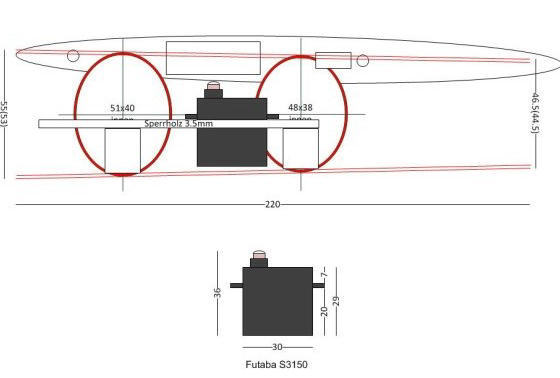
Ausbaukonzept mit Dimensionierung
|
Beschaffung
Der im 2010 entwickelte Zeus 3000 (2.96m) von Launch Model in V- und X-Leitwerk Ausführung ist auf dem CH- und D-Markt
wenig verbreitet, und die Beiträge in den Foren sind spärlich. Hingegen hat Launch Model weitere Grössen des Zeus produziert,
und diese kommen unter Anderem bei Staufenbiel mit dem Namen „Aiolos“ (3.17m) oder „Boreas“ (2.5m) oder „Skiron“ (2m) auf
den Markt. In der Schweiz wurde der Zeus 3000 vor nicht langer Zeit über den RCFlugshop.ch vertrieben. Jedoch läuft diese
Webseite nicht mehr, repräsentiert sich aber noch über Facebook und Ricardo und man kann Gilles Monney bei Bedarf sicher
auch per Mail anfragen.
Es gibt jedoch gleich zwei Vereinskollegen, die das Modell besitzen, wovon einer Verkaufsabsichten hatte auf Grund anderer
Projekte. Und der Andere begeisterte mich von den sehr guten Flugeigenschaften und der guten Verarbeitung dieses Modells.
So beschaffte ich mir das unberührte Modell meines Kollegen, und musste keine Wartezeiten in Kauf nehmen. Der offizielle
Preis von Launch Model beträgt USD 478.- für die 2.96m Ausführung mit Kreuzleitwerk (Stand bei Berichtabfassung), ohne
Versand nach Europa und ohne Zoll und MwSt.
Die Ausbaukomponenten und das Klein- und Verbrauchsmaterial wurde bei lokalen Händlern sowie bei Onlineshops bezogen.
Der Kostenpunkt für den Innenausbau beträgt Netto rund CHF 1‘000.- für meine Konfiguration.
|
Kreuzleitwerk
Im Bausatz ist neben den beiden CFK Schubstangen ein Umlenkhebel für das Pendelleitwerk mitgeliefert, sowie auch ein
Ruderhorn für die Seitenruderanlenkung beiliegend. Beides wurde modifiziert, um eine Verbesserung der Konstruktion zu
erzielen.
Der Umlenkhebel für das Pendelleitwerk ist werkseitig nur für eine einseitige Aufhängung
vorgesehen. Und durch das Festziehen der Lagerschraube würde es die Grundplatte von der Flosseninnenseite wegdrücken.
Diese Konstruktion gefiel mir nicht, denn das Leben des Zeus hängt davon ab. Meine Modifikation sieht eine beidseitige
Aufhängung der Lagerachse vor. Die Lagerschraube ist in meiner Ausführung also etwas länger, und auf der Gegenseite von
aussen mit einer Kontermutter und Loctite gesichert. So kann ich bedenkenlos die Lagerachse festziehen und sichern, und
so sollte sich durch die vielen Drehbewegung des Umlenkhebels nichts lösen können.
Die Seitenruderanlenkung
ist in meiner Modifikation mit einem Kugelkopf ausgeführt anstatt mit dem werkseitig geplanten Gabelkopf. Damit gewinne ich
mehr Bewegungsfreiheit bei der Anlenkung. Leider passt die Flucht der Schubstange überhabt nicht gut auf den Anlenkpunkt
des Ruders. So braucht es also noch zwei Knicke im Verbinder zwischen dem Kohlenrohr und der Gelenkpfanne. Die öffnung wird
wegen der Dicke der Schubstange dann leider immer noch recht lang, aber die Festigkeit sollte meiner Einschätzung nach nicht
namhaft darunter leiden.
|

| 
|

| 
|
Modifikation des Herstellerkonzepts: Beidseitige Aufhängung des Umlenkhebels, und Kugelkopf statt Gabel.
|
Klappen- und Ruderausschläge
Zur Ermittlung der minimalen und maximalen Ruder- und Klappenausschläge für den Arbeitsbereich werden die werkseitigen Spezifikationen berücksichtigt. Diese lauten wie folgt: |
| Höhenruder | +/- 10mm für Normalflug, -25% für Butterfly (ca. -3mm) |
| Seitenruder | +/- 20mm |
| Querruder | +25mm / -10mm für Normalflug (40% Diff), +30% für Butterfly (ca. +8mm) |
| Wölbklappen | 30% mit Querruder für Normalflug,-70% für Butterfly |
|
Die Werte wurden am Modell verifiziert und müssen minim angepasst werden: |
| S-Bus ID | Kanal | Stecker Nr. | Funktion | Funktion lang | Ruder mech. Anschlag | Ruder max. Arbeitsbereich |
| 002-21510 | 1 | - | QUER | Querruder Links | +25mm / -90° | +22mm / -(9)mm |
| 002-21522 | 2 | - | HöHE | Höhenruder | +18mm / -18mm | +10mm / -10mm |
| 002-21495 | 3 | - | SEIT | Seitenruder | +20mm / -20mm | +20mm / -20mm |
| 002-21511 | 4 | - | QUE2 | Querruder Rechts | +25mm / -90° | +22mm / -(9)mm |
| 002-21451 | 5 | - | WöLB | Wölbklappe Links | +25mm / -90° | +7mm / -3(-45°)mm |
| 002-21470 | 6 | - | WöL2 | Wölbklappe Rechts | +25mm / -90° | +7mm / -3(-45°)mm |
| | 7/B | - | MOTR | Motor | - | - |
| | 8 | - | - | - | - | - |
| | 9 | - | - | - | - | - |
| | 10 | - | - | - | - | - |
| | 11 | - | - | - | - | - |
| | 12 | - | BUTT | Butterfly | - | - |
| | DG1 | - | - | - | - | - |
| | DG2 | - | - | - | - | - |
+ Werte = Ausschlag nach oben, gemessen bei der grössten Flächentiefe
- Werte = Ausschlag nach unten, gemessen bei der grössten Flächentiefe
() Werte = Ausschlag mit Mischer-Offsets aus
Quer-Diff und Butterfly |
|
Servozuordnung zu Kanal und Funktion, und Arbeitsbereiche der Ruder und Klappen
|
Die Kanalzuordnung Butterfly ist notwendig, um den Butterfly Mischer einschalten und benutzen
zu können. Dieser Umstand der Kanalopferung lässt sich nicht verhindern und ist Senderbedingt gegeben (Futaba T8FG Super),
schadet aber auch nichts, da genügend Kanäle vorhanden sind (12+2).
Aus den obigen Servoendpunkteinstellungen wird ersichtlich, dass die Wölbklappen mit 30% Ausschlag der Querruder mitlaufen –
mit Ausnahme der Butterfly Stellung. Die Querruder Differenzierung beträgt 40%.
|
| Für die Flugphasen ergeben sich somit dann folgende Ausschläge im Arbeitsbereich: |
| Funktion lang | Ruder Zumischung
permanent | Ruder Zumischung
Schalter SA stossen | Ruder Zumischung
Schalter SB ziehen | Ruder Zumischung
Schalter SB stossen | Ruder Zumischung
Schalter SF ziehen |
| | Flugphase Normal | Flugphase Start (Mot) | Flugphase Thermik | Flugphase Speed | Flugphase Landung |
| Querruder Links | Mix: Quer-Diff | 0 | -2 | +2 | 0 bis +7 (Mix: Butt) |
| Höhenruder | - | 0 | 0 | 0 | 0 bis -3 (Mix: Butt) |
| Seitenruder | - | - | - | - | - |
| Querruder Rechts | Mix: Quer-Diff | 0 | -2 | +2 | 0 bis +7 (Mix: Butt) |
| Wölbklappe Links | - | 0 | -4 | 0 | 0 bis -45° (Mix: Butt) |
| Wölbklappe Rechts | - | 0 | -4 | 0 | 0 bis -45° (Mix: Butt) |
| Motor | - | - | - | - | - |
| Butterfly | - | - | - | - | - |
|
Ruderzumischung in verschiedenen Flugzuständen und mit verschiedenen Mischern
|
Hier wird ersichtlich, dass die Wölbklappen für die Landung gar nicht so stark in die Butterfly Stellung
fahren. Die Elektromechanik musste hier weitgehend begrenzt werden, damit die Klappen beim Landen nicht am Boden streifen
und Schäden anrichten. Der Testflug wird zeigen, ob die Bremswirkung für die Landung dennoch genügend ist.
|
Motoreinbau
Ohne es berechnen zu wollen und zu können, und ohne zuerst zehn Referenzbeispiele
zu suchen und zu finden, habe ich mich für den Motorsturz auf satte 5° geeinigt. Woher diese Zahl kommt? Ich weiss es nicht
so genau. Aber die Erfahrung zeigt, dass der Motorsturz bei Elektroseglern oft zu bescheiden ausfällt, so auch in meinem
letzten Elektrosegler Projekt. Für einmal wollte ich aber nicht wieder den Getriebeflansch unterlegen müssen. Für einmal
sollte es von Anfang an gut passen, ohne mühsame Nacharbeiten beim Antriebsflansch vornehmen zu müssen. Und so habe ich
voller Mut zur Säge gegriffen und eben für einmal ordentlich schräg gesägt.
Auf den Seitenzug verzichte ich, da ich auf die Gutmütigkeit des Modells setze und kein namhafter Einfluss aufgrund der
Luftwirbelströme am Seitenruder zu erwarten ist.
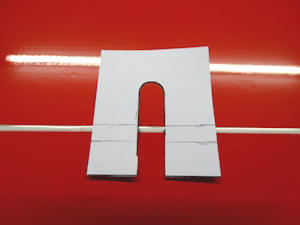
Für den Spinnerschnitt wurde beim Feinschliff eine
Schleifvorrichtung erstellt, die den Motorsturz fix berücksichtigt, und alle anderen Achsen im Lot hält. Der Feinschliff
erfolgt massgenau im zehntel Millimeterbereich, um eine formschöne Rumpfpassung des Spinners zu erreichen. Da der 34mm
Spinner mit 0.5mm Rumpfspalt montiert werden soll und die Nase nach hinten grösser wird, ist der Durchmesser des Nasenlochs
leicht grösser gewählt. Und weil der Rumpf oval ist, habe ich vorgängig zum Feinschliff noch ein Rundstück in die
Rumpfspitze eingesetzt, um das Oval auszugleichen. Ohne diese Vorrichtung würde die Schnittebene später nach dem
Einharzen des Rundspanten nicht mehr gerade verlaufen.
|

| 
|
Provisorische Schablone, aus Papier gefertigt und mit Epoxy verstärkt. Das massgenaue Einschleifen der Nase an der Bandschleifscheibe erfordert eine
winkelgetreue Einrichtung für alle Achsen - und auch etwas Fingerspitzengefühl.
|
Der Motorspant ist aus 2.2mm CFK gefertigt und ebenfalls massgenau auf zehntel Millimeter rund gefräst
und ins Nasenloch eingepasst, bis die Getriebewelle den Spinner gut aufnimmt, aber der Spinnerspaltabstand von 0.5mm zum
Rumpf noch erreicht werden kann. Der Spant erhält neben den 3 Löchern für den Getriebeflansch zusätzlich 3 grössere Löcher
für die Luftkühlung. Diese sind so angelegt, dass der Getriebeflansch sowie der Motormantel gekühlt werden. Der eingesetzte
Turbospinner von Simprop hat hierzu den notwendigen Lufteinlass. Der Luftaustritt erfolgt über einige Löcher in der GFK Haube.
|

| 
|
Deutlich zu erkennen: Gestürzter Schnitt und ovaler Rumpf. Letzteres wird mit dem Einharzen des Rundspanten noch auf einen Kreis von 34.5mm ausgeglichen.
|

| 
|
Fertigung des CFK Motorspants. Die 3 grösseren Löcher dienen der Motor- und Getriebekühlung. Der Spinner sitzt rundum spaltgleich, formkontinuierlich und in der Flucht der Rumpflängsachse.
|
Akku- und Reglereinbau
Die Suche nach dem optimalen Akku bescherte zahlreiche Stunden Aufwand.
Einerseits sollte die Kapazität sowie die Entladekonstante möglichst gross sein, um den geplanten Motorstrom überhaupt
erreichen zu können. Andererseits sollte der Akku in der Bauform nicht zu gross werden, da die Platzverhältnisse im Rumpf
sehr beschränkt sind. Und zum Dritten wollte ich alleine mit dem Akku den Schwerpunktbereich einstellen können, ohne
Trimmblei verwenden zu müssen.
Diese drei Anforderungen führten dazu, dass ich zunächst den Rumpfquerschnitt
im geplanten Akkubereich ausgemessen und aufgezeichnet habe, um darin verschiedene Akkus zu platzieren. Das Vorgehen
resultierte in einer Matrix, welche verschiedene mögliche Akkuquerschnitte im Hoch- und Querformat aufzeigte. Es wurden
ca. 30 Akkumodelle verschiedener Lieferanten und Hersteller im Bereich von 3S bis 4S untersucht, welche im Bereich zwischen
2‘000 und 4‘000mAh und 25C bis 50C lagen und die Platzanforderungen gemäss der Matrix erfüllen sollten. Der
Schwerpunktbereich wurde dann jeweils mit einer Gewichtsimulation direkt am Modell verifiziert. Am Ende der Evaluation
stand dann nur noch eine ganz kleine Zahl an Möglichkeiten zur Verfügung.
Bei der Reglerwahl war die
Selektion deutlich einfacher und schneller erledigt, da weder die Platzverhältnisse noch das Gewicht ein namhaftes Problem
darstellen. Allenfalls nur der Preis, denn der Regler sollte min. 100A Strom liefern können und muss ein starkes BEC
aufweisen. Und das kostet eben, und zwar nicht wenig.
Die Drehstromanschlüsse wurden direkt mit den
Motoranschlüssen verlötet. Dieses Vorgehen ist zwar ungewöhnlich, bescherte mir aber weitere Vorteile im Schwerpunktbereich
so wie bei der Platzreserve für das Hantieren mit dem Flugakku, da die 6 Goldkontaktstecker und -Buchsen in dieser Lösung
wegbleiben. Zudem wären drei kurze Verlängerungsleitungen notwendig gewesen, damit die Steckkontakte von Regler und Motor
gerade aufeinandertreffen können. Hierzu wäre insgesamt wieder einiges an Platz verloren gegangen und hätte wieder
Zusatzgewicht in der Nase bedeutet. Der Regler kann die Motordrehrichtung über einen Software Parameter ändern. Damit
habe ich keine gekreuzte Kabelführung und erhalte wiederum noch mehr Platz.
|

| 
|
Lage des Akkus: Die Verschiebung des Akkus erlaubt die Nutzung des gesamten Schwerpunktbereich gemäss Herstellerangabe. Vorne sitzt der Regler, der direkt mit den Drehstromleitungen des Motors verlötet ist.
|
S-Bus Verkabelung
Die S-Bus Verkabelung gestaltet sich Dank des dreiadrigen Buses denkbar
einfach, und der Platz für die S-Bus Hubs stellt weiter auch kein Problem dar. Dies erlaubt eine saubere, übersichtliche
und raumfreie Kabelführung, und die Schubstangen im Rumpf gehen sehr gut an den Adern vorbei.
Die Lötvorgänge beschränkten
sich noch auf die dreiadrigen Flächenverbindungen. Der eingesetzte Empfänger kann den S-Bus mit 3A treiben, das reicht mir
gerade für die 6 S-Bus Servos, in der Voraussicht, dass nie alle Servos gleichzeitig den Maximalstrom ziehen.
|

| 
|
Einfache S-Bus Kabelführung mit sicherer Distanz zu beweglichen Teilen im Bereich der Schubstangen. Vorteil beim Stecker löten: Nur drei Adern sind für die Flächenservos zu verbinden. Die MPX Aussparungen im Rumpf und in den Flächen passen prima, und es bedarf kaum nennenswerter Nacharbeit.
|
Flächensicherung und Torsionsstifte
Für die Flächensicherung sind die weissen Multilock von
Multiplex vorgesehen. Meine gewählte Zugstärke hat im Zapfen 2 Ringe (Dübelpilz 5.6mm). Das Rumpfloch hat mit 11mm
Durchmesser eine respektable Grösse, und das Sicherungskonzept drohte zu scheitern auf Grund des Konzepts mir dem
demontierbaren Servobrett. Doch die Position des Multilocks konnte etwas nach oben versetzt werden, um mit ausreichendem
Abstand am Servobrett vorbei zu kommen. Für den Flugbetrieb wird der kleine Flächenspalt zum Rumpf hin dann wie üblich noch
mit einem Tesastreifen abgeklebt.
|

| 
|
üppiges Bohrloch für die Flächensicherung.
|
Die mitgelieferten Torsionsbolzen aus CFK hatten vor dem Einbauen zunächst noch ein kleines Lifting
nötig. Ich habe die Enden noch etwas besser angefast, damit sie beim zusammenschieben der Flächen besser zentriert werden.
|

| 
|
Links: Die werkseitigen CFK Rohlinge. Rechts: Die verbesserten Torsionsbolzen
|
Flächenausbau
Für die 4 Flächenservos habe ich Standard Servoeinbaurahmen für Futaba 3150 b
eschafft und in die innere Oberseite der Flächen eingeharzt. Die Klappenanlenkung erfolgt gemäss der Bauanleitung für Quer
und Wölb als Z-Anlenkung, um maximalen Ausschlag vor allem bei Butterfly zu erzielen. Die mitgelieferten Augenschrauben
werden wie in der Bauanleitung vorgesehen auf der Klappenoberseite angeschlagen. Bei rauheren Landungen am Hang besticht
der Vorteil der obenliegenden Anlenkvorrichtung. Sie vermeidet etwaiges Streifen oder Einhängen der Mechanik am Boden, und
schont damit das Gestänge und das Servo.
Die Augenschrauben habe ich 45° schräg in die Klappen eingesetzt,
für erweiterten Klappenausschlag nach unten. Für eine bessere Montage wurde pro Augenschraube vorgängig eine Sperrholzkonsole
errichtet, um mehr Festigkeit und eine bessere Kräfteverteilung zu erzielen. Der Anlenkpunkt liegt exakt über dem Drehpunkt
der Klappe.
Auf der Klappenseite habe ich den stellbaren Gabelkopf gewählt. Auf der Servoseite kommt der
Kugelkopf zum Einsatz. Damit erreiche ich gegenüber dem Gabelkopf den nötigen Servoweg unter Einhaltung der Kraftreserve und
unter Berücksichtigung der Auswirkung auf allfälliges Anlenkungsspiel.
|
| 
|
Schablone für die obenliegenden Aussparungen in den Flächen und den Klappen.
|

| 
|
Konsole für die Augenschraube, Situation bei voll gesetzter Wölbklappe und in Neutralstellung.
|
Die Gigaflaps werden einfach mit transparentem Tesaband mit den Querrudern verbunden und laufen so mit.
Der durch die Querruderbewegung minim verschränkte Ruderspalt wird durch das leicht elastische Tesaband gut aufgenommen.
Die losen Buskabelverlängerungen werden zwischen den Servoschächten in einem 7x6mm Carbonrohr geführt, da ich in den Flächen
keine Klappergeräusche mag.
Die beiden Flächenhälften hatten ab Werk 30g Gewichtsunterschied, und der
Flieger rollte schon auf der Werkbank. Auch nach dem Flächenausbau blieb es bei 30g Differenz. Um diesen Störfaktor
aufzuheben, wurde in die rechte Fläche je 15g Blei in die Servoschächte montiert.
|

| 
|
Fertig vorbereitetes Flächenpaar: Die Unterseite zeigt die Servorahmen, und die Oberseite zeigt die Aussparungen für die Anlenkungen.
|

| 
|
Gut zu erkennen: Im 45° Winkel angeschlagene Augenschrauben, das verbessert den Klappenausschlag. Nicht gut zu erkennen: Der Anlenkpunkt liegt exakt über dem Klappenscharnier.
|
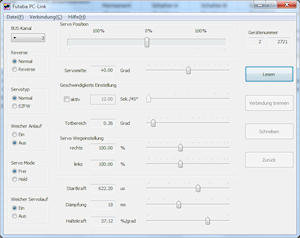
S-Bus Programmierung
Die S-Bus Servos programmiere ich wie schon oft erprobt und bewährt jedes einzeln am PC über den Futaba CIU-2 Link per
USB-Schnittstelle und der PC-Link Software. Die Servokonfigurationsparameter werden allesamt mit den Werkseinstellungen
belassen, ausser die Kanalnummer wird neu zugeordnet.
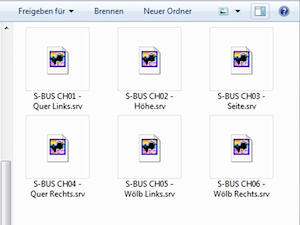
Pro Servo wird eine Konfigurationsdatei angelegt, die
bei Servoersatz einfach wieder in das neue Servo geladen werden kann.
|
| 
|
Links: PC-Link Software mit Konfigurationsdaten und S-Bus Servoparameter für die
Mikrocontroller-Firmware jedes einzelnen Servos.
Rechts: Die angelegten Datenfiles für allfällige Restores.
|
Flugzustände (Flugphasen) und Mischer
Es sind 5 Flugzustände über verschiedene Schalterpositionen am Sender nach folgender Priorität programmiert:
„Landung“ über Schalter SF, Schalter nach hinten gezogen. In dieser Phase wird der BUTTERFLY Mischer eingeschaltet,
welcher die Wölbklappen, die Querruder sowie das Höhenruder in einem bestimmten Mischverhältnis über den Senderstick J3
feinfühlig in die Krähenfuss-Position bringt. Der J3 Stick ist nur in diesem Flugzustand aktiv, damit nicht in einem anderen
Flugzustand versehentlich auf die Bremse getreten wird.
„Thermik“ über Schalter SB, Schalter nach
hinten gezogen. In dieser Phase erhalten die Wölbklappen und die Querruder einen negativen Ruderausschlag-Offset (positive
Verwölbung) im Millimeterbereich gemäss meiner Tabelle. Dieser Offset wird mit dem Trim Mischer gelöst.
„Speed“ über Schalter SB, Schalter nach vorne gestossen. In dieser Phase erhalten die Querruder einen positiven
Ruderausschlag-Offset (negative Verwölbung) im Millimeterbereich gemäss meiner Tabelle. Dieser Offset wird mit dem Trim
Mischer gelöst.
„Start“ über Schalter SA, Schalter nach vorne gestossen. In dieser Phase kann dem
Höhenruder bei Bedarf einen negativen Ruderausschlag-Offset im Millimeterbereich beigemischt werden, um einen allfälligen
Motorsturz angleichen zu können. Dieser Offset wird mit dem Trim Mischer gelöst. über den Schalter wird der Motor zweistufig
ein- und ausgeschaltet.
„Normal“ wenn die obigen Schalter SA und SB und SF ausgeschaltet sind resp. in
Neutralstellung stehen. In dieser Phase ist die Motorzuschaltung deaktiviert, und alle Ruder und Klappen sind bei neutraler
Knüppelstellung auf ihren Nullpunkten. Nur noch die Querruder, die mit den Querrudern 30% mitlaufenden Wölbklappen, das
Höhenruder und das Seitenruder werden über die Sendersticks J1, J2 und J4 angesteuert.
Neben dem erwähnten
Standard-Mischer BUTTERFLY, den Master-Slave Mischern und dem Trim Mischer, kommt die Querruder-Differenzierung von 40%
zum Einsatz. Die 30% Wölbklappenmitnahme ist im Flugzustand LANDUNG ausgeschaltet, da dort die Wölbklappen gänzlich für
den Butterfly verwendet werden.
|
Testflug
Vor dem ersten Testflug wurde eine „trockene“ Inbetriebnahme durchgeführt. Dazu gehörte neben der Funkdistanzprobe auch die Endkontrolle der Ruder- und Klappenausschläge, des Schwerpunkts 110mm und der EWD 0.5°, und schliesslich auch die Strom- und Spannungsmessungen für den Antrieb. Letztere beschreibt eine Eingangsleistung von 840W unter Berücksichtigung der deutlich reduzierten Zellenspannung von 3.4V/Zelle bei der Akku C-Rate von 73%.
Der Testflug erfolgte in der Ebene. Leider waren mit Böen bis zu 30km/h keine Referenzeinstellungen für die Flugphasen möglich. Doch der Flieger musste jetzt einfach mal raus, zu lange war die Wartezeit auf den Erstflug. Für die Flugzeugabgabe hatte ich Marcel den Vereinskollegen zur Hilfe. Der Motorsturz von 5° erwies sich erfreulicherweise als überaus ideal. Hier muss am Sturz nichts korrigiert und am Höhen-LW nichts nachgetrimmt werden. Der Zeus schiesst wie ein Pfeil in den Himmel, und die Steigrate von 20m/s übertrifft meine Erwartungen deutlich. Für die spätere Selbstabgabe werde ich die mittlere Motorstufe auf ca. 70% setzen und mit dieser Stufe starten.
Leider ist beim zweiten Motor EIN auf 50m Höhe der Spinner mitsamt dem Mittelstück und den CFK Blättern von der Getriebewelle abgefallen. Dank dem Kollegen wurde die Einheit unbeschädigt im Feld wieder gefunden. Hier muss ich die Getriebewelle anrauhen, alles sauber entfetten und den Klemmkonus deutlich besser festziehen. Auch das Multilock hat sich auf der einen Flächenseite gleich beim Zusammenbau verabschiedet, nachdem es zu Hause zuvor 20x gut gehalten hat. Die Wurzelrippe ist halt schon arg dünn und weich, so dass eine dauerhafte Fixierung schwierig wird. Ich versuche jetzt noch, das Multilock mit Microballoons besser einzuharzen. Wenn das wieder nicht dauerhaft hält, bleiben die Flächen einfach nur mit dem Tesaband alleine gesichert.
Nach den obigen Baukorrekturen war der Zweitflug angesagt. Die Abgabe ohne Helfer war absolut unproblematisch, und der senderseitig programmierte Sanftanlauf von 2s war angenehm. Auch die Windverhältnisse waren jetzt idealer, sodass alle Referenzeinstellungen vorgenommen werden konnten. Schwerpunkt und EWD erwiesen sich auf Anhieb als korrekt, und es ist nach dem Anstechen kein Abfangbogen auszumachen. Der Flieger erwies sich bei den ersten Kunstflugeinlagen als überaus wendig und stabil, und die Flächen zeigten sich während dem Manöver unbeeindruckt. Das Sportgerät liegt wie auf Schienen, reagiert sehr unverzüglich auf Steuereinflüsse, gibt im schnellen überflug seinen unverkennbaren F3x Sound von sich, und meine Begeisterung ist riesig. Die Thermikeigenschaften können mit dem heutigen Flug nicht abschliessend beurteilt werden, denn die nächsten Regenwolken zwangen mich zum frühzeitigen Testende. Was sich aber aus den bisherigen Erkenntnissen abzeichnet reicht zur Aussage, dass der Zeus auch in dieser Disziplin viel Leistung verspricht und sich offenbar zum beliebten Allrounder mausern wird. Der Butterfly wirkt hervorragend, und die Landungen können weich und gezielt erfolgen. Die Werksangaben für die Tiefenruderzumischung ist deutlich zu gering angesagt, dort gebe ich für den nächsten Flug noch 2mm Tiefe zum bisherigen Wert dazu.
Ende Mai geht’s mit dem Zeus für zwei Tage nach Monte Lema. Dort wird sich die Erprobung am Hang noch beweisen müssen. Ich freue mich riesig darauf, denn die Erwartungen auf einen grossen Spassfaktor sind mit diesem gelungenen Modell absolut berechtigt.
|
Zum Schluss…
Mein herzlicher Dank geht an Ingo Mauz aus dem RC-Network, sowie an Jürg Vetterli und Marcel Schneider von der MG-Weinfelden für die Unterstützung und Beratung in diesem Projekt.
Zu Erwähnen ist auch, dass Launch Model, praktisch auf der anderen Seite der Erde, während der gesamten Bauzeit auf alle meine Fragen per Mail ausnahmslos innerhalb von 48h geantwortet hat. Ein überraschender und toller Support, den ich mir bei lokaleren Herstellern und Lieferanten teilweise sehr viel mehr wünsche.
|
 |
Vorher -
|
 |
Nachher
|
Fredi Wiegisser
Ottoberg, im Mai 2014 |